
DRV8834 Low-Voltage Stepper Motor Driver Carrier
We have ✅ 2 available of the PL-2134 in our Sydney warehouse.
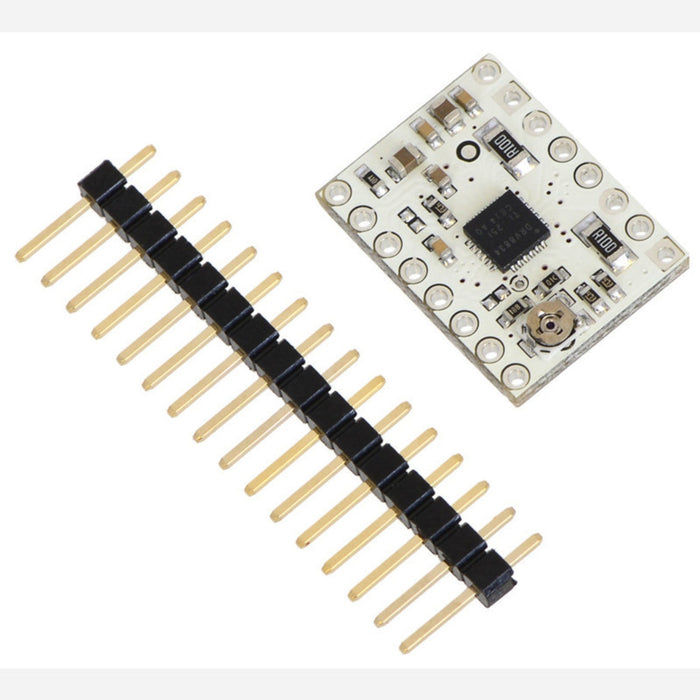
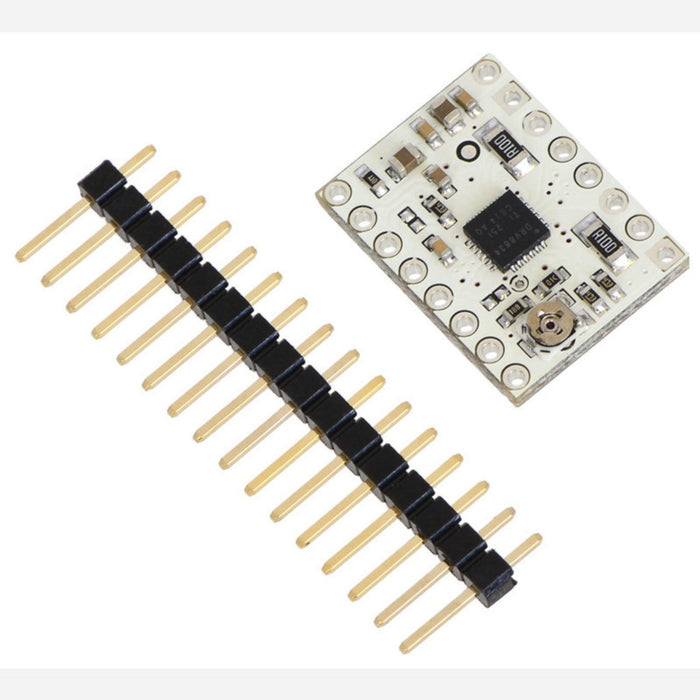
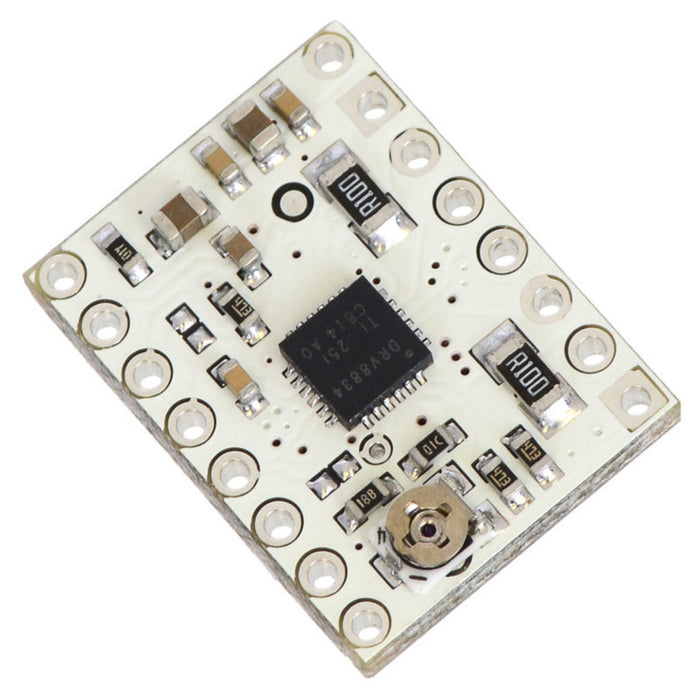
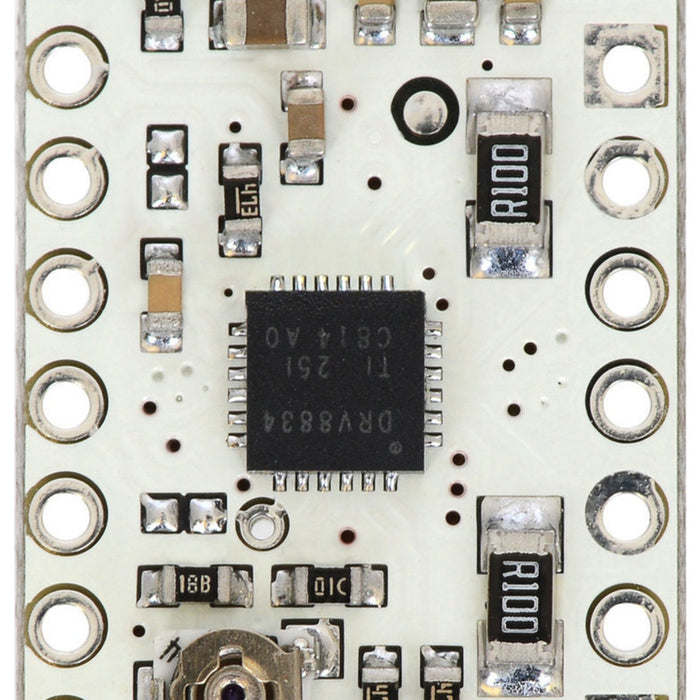
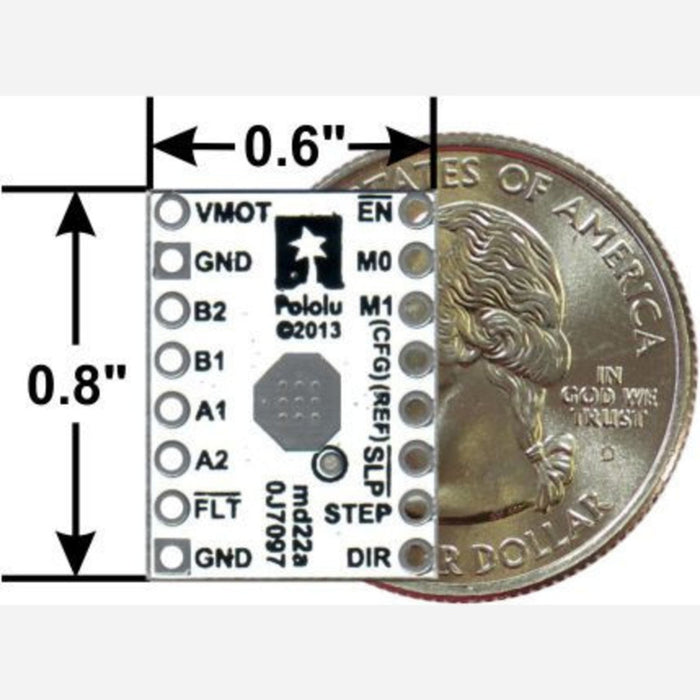
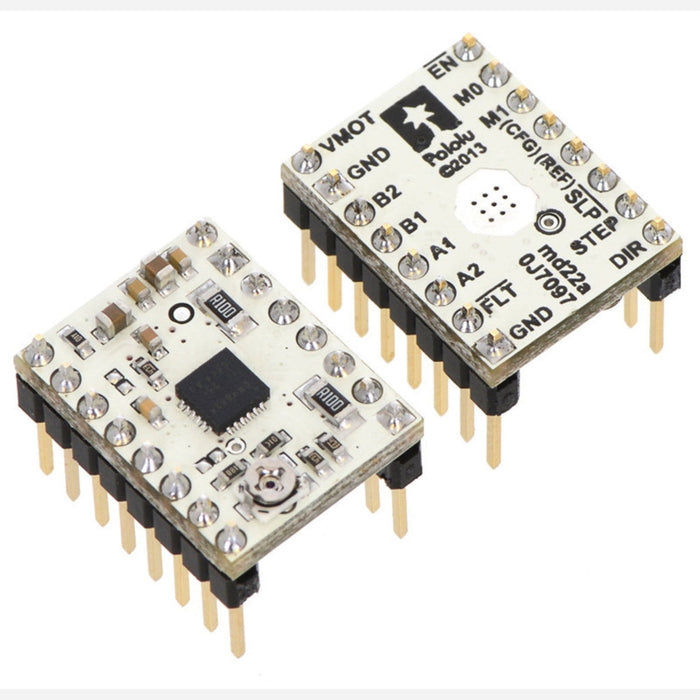
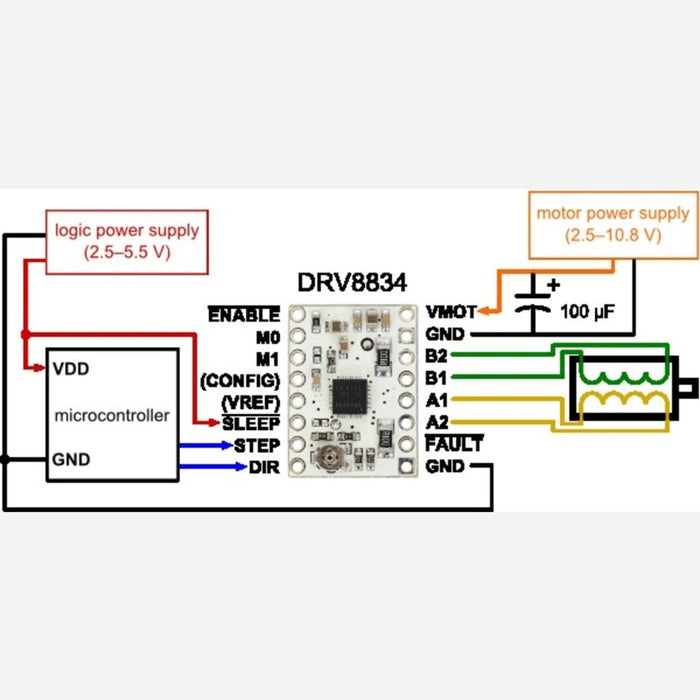
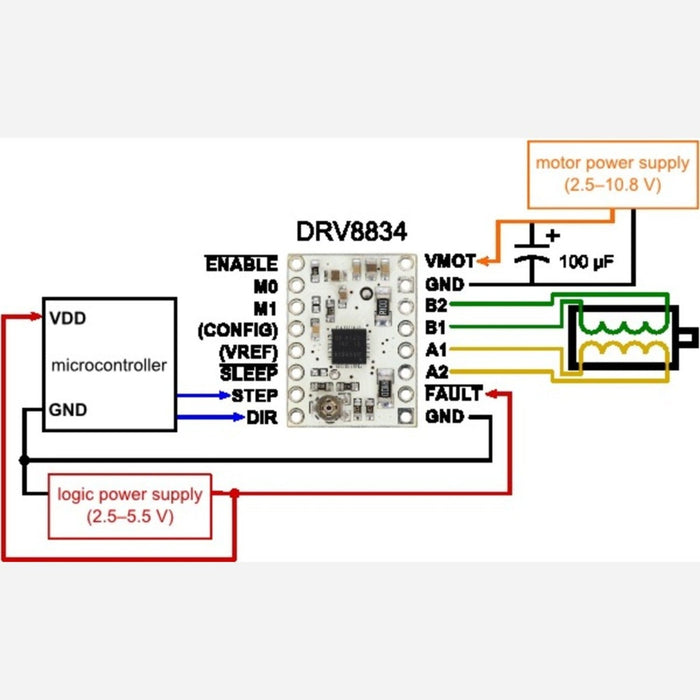
This is a breakout board for TI’s DRV8834 microstepping bipolar stepper motor driver. It has a pinout and interface that are nearly identical to those of our A4988 carriers, so it can be used as a drop-in replacement for those boards in many applications. The DRV8834 operates from 2.5–10.8 V, allowing stepper motors to be powered with voltages that are too low for other drivers, and can deliver up to approximately 1.5 A per phase continuously without a heat sink or forced air flow (up to 2 A peak). It features adjustable current limiting, overcurrent and overtemperature protection, and six microstep resolutions (down to 1/32-step). This board ships with 0.1″ male header pins included but not soldered in.
The DRV8834 Low-Voltage Stepper Motor Driver Carrier appears in the following collections: