
ArduPilot Main Board(Discontinued)
This product has retired since Nov 26th, 2015. This is a Arduino-compatible autopilot board designed by Chris Anderson and Jordi Muñoz of DIY Drones using the new ATMega328. This board was used to win the annual autonomous vehicle competition put on by SparkFun.
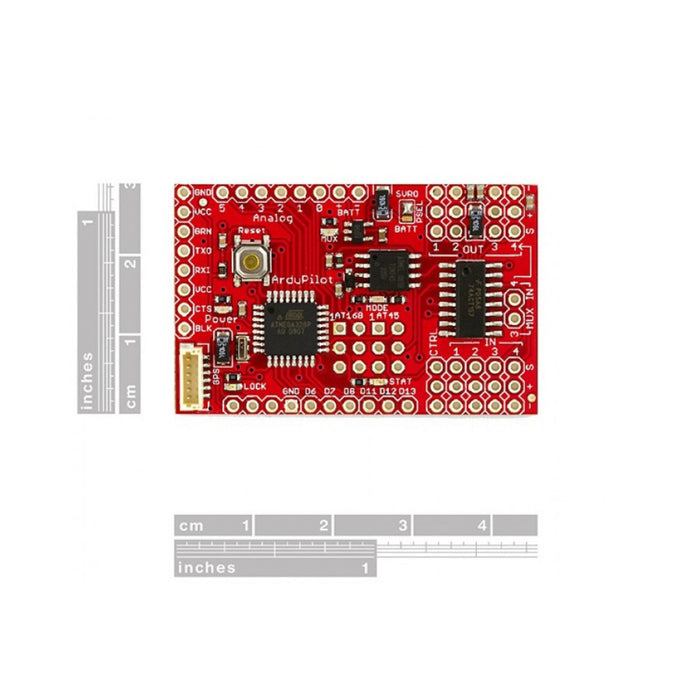
ArduPilot is a fully programmable autopilot that requires a GPS module and infrared XY and Z sensors to create a functioning Unmanned Aerial Vehicle (UAV). The autopilot handles both stabilization and navigation, eliminating the need for a separate stabilization system. It also supports a "fly-by-wire" mode that can stabilize an aircraft when flying manually under RC control, making it easier and safer to fly. The hardware and software are all open source. The board comes with all the surface-mount parts already soldered, but requires the user to solder on connectors. Firmware is already loaded, but the autopilot software must be downloaded and loaded onto the board by the user. It can be programmed with the Arduino IDE. All details and instructions can be found at the project's home page.
We highly recommend the following items to accompany this product:
- An EM406 GPS module
- An FTDI Basic or FTDI cable for programming
- An extended EM406 GPS cable
- An Expansion Board with airspeed sensor
- XY and Z sensors
Other necessary elements, including aircraft recommendations, can be found at the project's home page.
SPECIFICATIONS
Controller designed to be used with autonomous aircraft, car or boat. Infrared sensor required only for aircraft.
Based on a 16MHz Atmega328 processor. Total onboard processing power aprox 24 MIPS.
Built-in hardware failsafe that uses a separate circuit (multiplexer chip and ATTiny processor) to transfer control from the RC
system to the autopilot and back again. Includes ability to reboot the main processor in mid-flight.Multiple 3D waypoints (limited only by memory)
Comes with a 6-pin GPS connector for the 1Hz EM406 GPS module
Has six spare analog inputs (with ADC on each) and six spare digital input/outputs to add additional sensors
Supports addition of wireless downlink module for telemetry
Can be powered by either the RC receiver or a separate battery
Hardware-driven servo control, which means less processor overhead, tighter response and no jitters.
Four RC-in channels (plus the autopilot on/off channel) can be processed by the autopilot.
LEDs for power, failsafe status, autopilot status and GPS lock
Dimensions: 30mm x 47mm
DOCUMENTS
- Schematic
- Eagle Files
- ArduPilot Project Homepage
- Software and instructions: DIY Drones Community
- ATtiny Firmware
SHIPPING LIST
- ArduPilot Main board x1
The ArduPilot Main Board(Discontinued) appears in the following collections: